Abdullah Mohiuddin Ph.D
Abdullah Mohiuddin graduated from Khalifa University of Science and Technology in Ph.D in Engineering program with a specialiazation in Mechanical Engineering in 2019. He received his Master’s in Sustainable Environment and Energy Systems form Middle East Technical University Turkey in 2015. His research interests include single and multi-UAV aerial manipulation.
Research Experiences
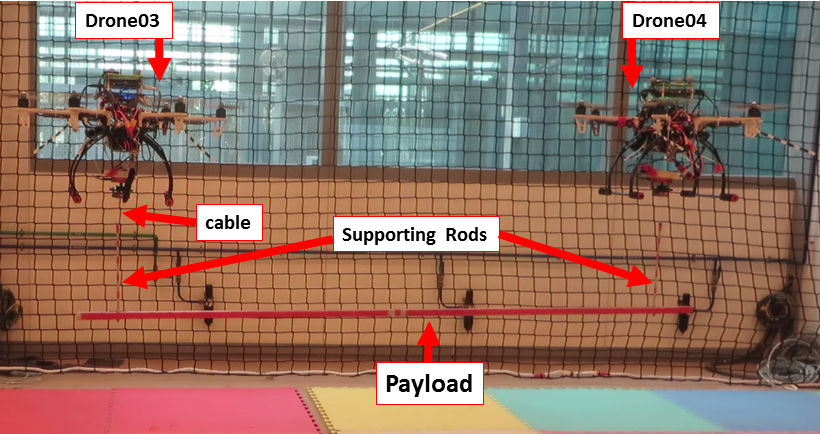
Dual UAV collaborative aerial manipulation
June 2016 – October 2019
The project focusses on the energy aspects of dual UAV collaborative transport. The contributions are threefold
1) Application of Realtime Dynamic Programming in velocity optimization of single UAV aerial manipulation 2) Energy consumption management in multi-UAV collaborative transport is important since multi-rotors are known for low flight time and power failure in one of the UAVs can fail the whole operation. This, therefore proposes a novel experimentally verified strategy to distribute the lifting load of the jointly carried object by changing the orientation of the payload. Distribution of lifting force also enables us to regulate the power distribution between the UAVs. This distribution of power consumption can ensure mission completion when one UAV has less state of charge than the other. 3) Application of Realtime Dynamic Programming in Velocity optimization of dual UAV Collaborative aerial manipulation.